



转载:https://www.toutiao.com/article/7365108077126779411/
2024-05-04 23:14·古月居
在本文中,我们将主要介绍Dijkstra算法和A*算法,从成本计算的角度出发,并逐步展开讨论。我们将从广度优先搜索开始,然后引入Dijkstra算法,与贪心算法进行比较,最终得出A*算法。
成本计算
在路径规划中,成本计算的一个主要因素是距离。距离可以作为一种衡量路径长短的度量指标,通常使用欧几里得距离、曼哈顿距离或其他合适的距离度量方法来计算。本文主要介绍欧几里得距离与曼哈顿距离。


广度优先搜索
广度优先搜索(Breadth First Search,BFS )是一种图遍历算法,按照广度方向逐层遍历所有可达节点。
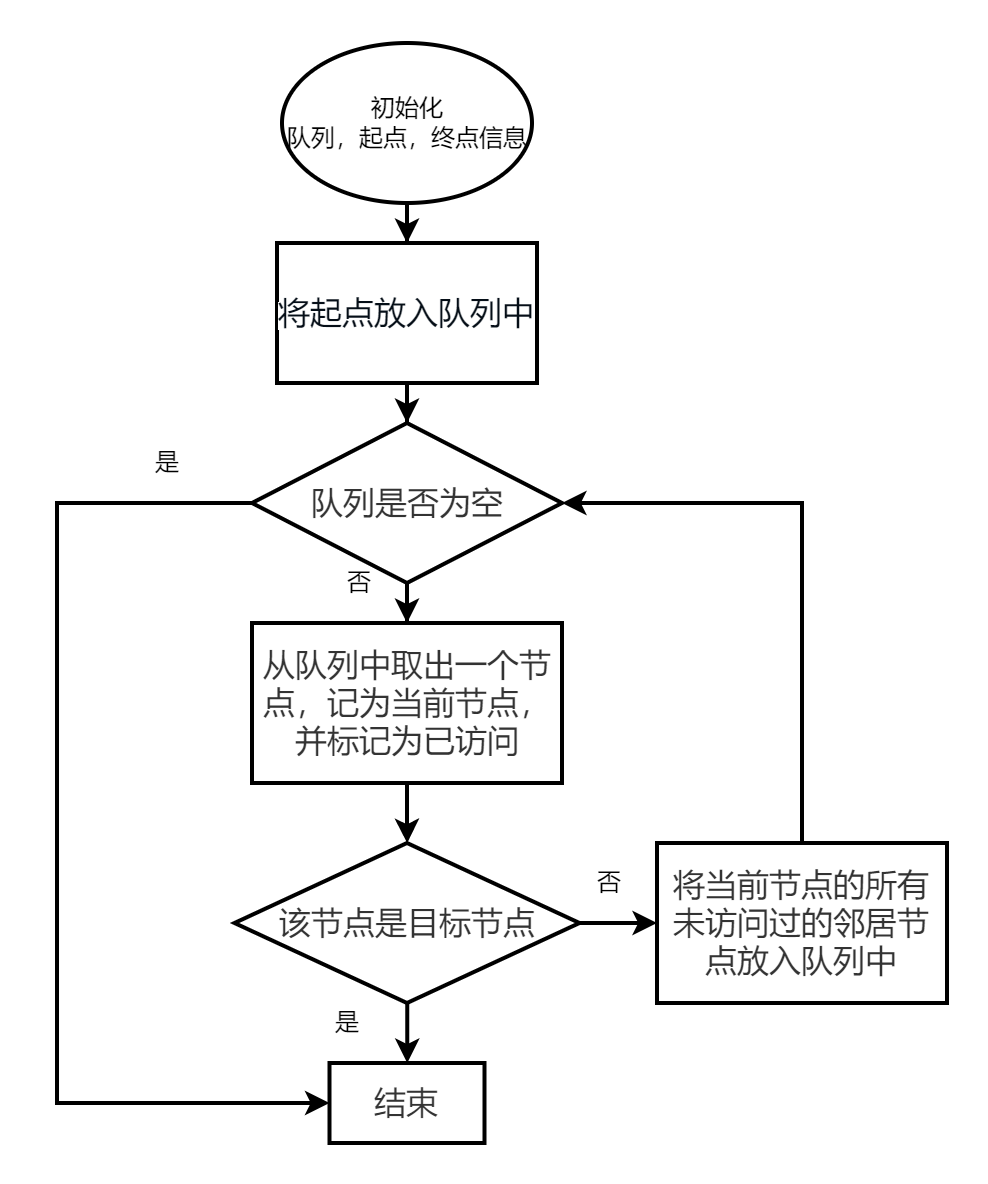
BFS的基本思想是通过维护一个队列,逐层访问节点。具体步骤如下:
1.将起始节点放入队列中,并标记为已访问。
2.当队列非空时,执行以下步骤:
- 从队列中取出一个节点,记为当前节点,并标记为已访问。
- 如果该节点是目标节点,则返回结果。
- 将当前节点的所有未访问过的邻居节点放入队列中。
3.如果队列为空,则表示已经遍历完所有可达节点,算法结束。
算法框图
实现效果如下:
广度优先搜索是一种基本的图搜索算法,它按照图的广度方向逐层遍历所有可达节点。然而,BFS并不考虑边的权重,它只关注节点的层级关系。因此,对于成本计算来说,BFS并不适用。这里为了实现到目标点的搜索,采用了曼哈顿距离计算初始点的行进成本。
代码
def searching(self):
""" Breadth-first Searching. :return: path, visited order """
self.PARENT[self.s_start] = self.s_start # 开始节点的父节点
self.g[self.s_start] = 0 # 开始节点的成本
self.g[self.s_goal] = math.inf # 目标节点的成本
# 统一成本搜索,起点的成本是0
heapq.heappush(self.OPEN,
(0, self.s_start))
while self.OPEN:
_, s = heapq.heappop(self.OPEN) # 弹出最小的元素,优先级较高
self.CLOSED.append(s) # 将节点加入被访问元素队列,已访问
if s == self.s_goal: # 到达目标点,即停止
break
for s_n in self.get_neighbor(s): # 得到s的邻居节点
new_cost = self.g[s] + self.cost(s, s_n)
# 计算当前邻居节点s_n的成本=g(s)节点s的成本+s到s_n之间的成本
if s_n not in self.g: # 当前节点没有访问过
self.g[s_n] = math.inf # 起点到节点s_n的成本为无穷
if new_cost < self.g[s_n]: # conditions for updating Cost
self.g[s_n] = new_cost
self.PARENT[s_n] = s
# bfs, add new node to the end of the openset
# 将新的节点添加到队列的末尾
prior = self.OPEN[-1][0] + 1 if len(self.OPEN) > 0 else 0
heapq.heappush(self.OPEN, (prior, s_n))
self.f[s_n] = prior
return self.extract_path(self.PARENT), self.CLOSED, self.fDijkstra算法
迪杰斯特拉算法(Dijkstra)算法是一种单源最短路径算法,用于在加权图中找到从起点到所有其他节点的最短路径。它基于贪心策略,每次选择当前距离起点最近的节点,并通过该节点更新与它相邻的节点的距离。具体步骤如下:
1.初始化:初始化变量和数据结构,创建一个包含所有节点的集合,并为每个节点设置一个距离值。将起始节点的父节点设置为自身,将起始节点的距离值设置为0,其他节点的距离值设置为无穷大(表示尚未找到最短路径)。将起始节点以成本0的优先级推入优先队列OPEN中。
2.主循环:当OPEN非空时:
- 弹出优先级最小(成本最低)的节点(_, s),其中_为忽略的值,s为当前节点。
- 将当前节点s添加到CLOSED列表中,表示已访问。
- 检查当前节点是否为目标节点。如果是,则跳出循环。
- 对于当前节点的所有邻居节点,计算通过当前节点到达邻居节点的距离,并与邻居节点的当前距离值进行比较。如果计算得到的距离值小于邻居节点的当前距离值,则更新邻居节点的距离值为新的更小值,并将邻居节点s_n以新的成本作为优先级推入优先队列OPEN中
3.循环结束后,可以通过从目标节点回溯到起始节点,在PARENT字典中提取最短路径。
算法框图
 相关新闻
相关新闻
 相关广告
相关广告

 拨打电话
拨打电话